import cv2 import numpy as np import matplotlib.pyplot as plt
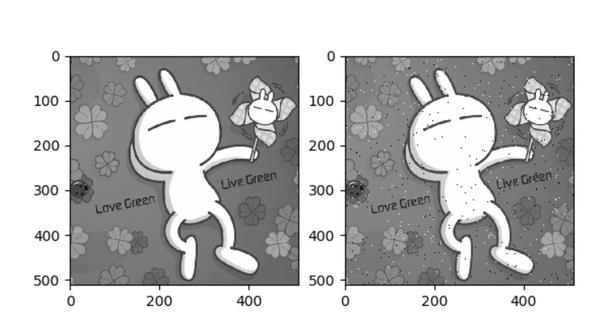
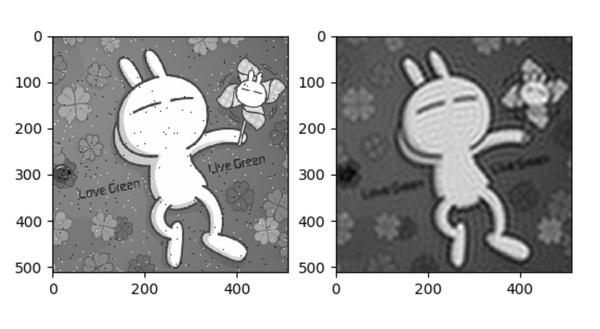
# 定义添加椒盐噪声的函数 def SaltAndPepper(src,percetage): SP_NoiseImg=np.copy(src) SP_NoiseNum=int(percetage*src.shape[0]*src.shape[1]) for i in range(SP_NoiseNum): randX=np.random.random_integers(0,src.shape[0]-1) randY=np.random.random_integers(0,src.shape[1]-1) if np.random.random_integers(0,1)==0: SP_NoiseImg[randX,randY]=0 else: SP_NoiseImg[randX,randY]=255 return SP_NoiseImg
import numpy as np import cv2 import matplotlib.pyplot as plt
# 定义添加椒盐噪声的函数 def SaltAndPepper(src,percetage): SP_NoiseImg=np.copy(src) SP_NoiseNum=int(percetage*src.shape[0]*src.shape[1]) for i in range(SP_NoiseNum): randX=np.random.random_integers(0,src.shape[0]-1) randY=np.random.random_integers(0,src.shape[1]-1) if np.random.random_integers(0,1)==0: SP_NoiseImg[randX,randY]=0 else: SP_NoiseImg[randX,randY]=255 return SP_NoiseImg
import numpy as np import cv2 import matplotlib.pyplot as plt
# 定义添加椒盐噪声的函数 def SaltAndPepper(src,percetage): SP_NoiseImg=np.copy(src) SP_NoiseNum=int(percetage*src.shape[0]*src.shape[1]) for i in range(SP_NoiseNum): randX=np.random.random_integers(0,src.shape[0]-1) randY=np.random.random_integers(0,src.shape[1]-1) if np.random.random_integers(0,1)==0: SP_NoiseImg[randX,randY]=0 else: SP_NoiseImg[randX,randY]=255 return SP_NoiseImg
import numpy as np import cv2 import matplotlib.pyplot as plt
# 定义添加椒盐噪声的函数 def SaltAndPepper(src,percetage): SP_NoiseImg=np.copy(src) SP_NoiseNum=int(percetage*src.shape[0]*src.shape[1]) for i in range(SP_NoiseNum): randX=np.random.random_integers(0,src.shape[0]-1) randY=np.random.random_integers(0,src.shape[1]-1) if np.random.random_integers(0,1)==0: SP_NoiseImg[randX,randY]=0 else: SP_NoiseImg[randX,randY]=255 return SP_NoiseImg
import numpy as np import cv2 import matplotlib.pyplot as plt
# 定义添加椒盐噪声的函数 def SaltAndPepper(src,percetage): SP_NoiseImg=np.copy(src) SP_NoiseNum=int(percetage*src.shape[0]*src.shape[1]) for i in range(SP_NoiseNum): randX=np.random.random_integers(0,src.shape[0]-1) randY=np.random.random_integers(0,src.shape[1]-1) if np.random.random_integers(0,1)==0: SP_NoiseImg[randX,randY]=0 else: SP_NoiseImg[randX,randY]=255 return SP_NoiseImg
import numpy as np import cv2 import matplotlib.pyplot as plt
# 定义添加椒盐噪声的函数 def SaltAndPepper(src,percetage): SP_NoiseImg=np.copy(src) SP_NoiseNum=int(percetage*src.shape[0]*src.shape[1]) for i in range(SP_NoiseNum): randX=np.random.random_integers(0,src.shape[0]-1) randY=np.random.random_integers(0,src.shape[1]-1) if np.random.random_integers(0,1)==0: SP_NoiseImg[randX,randY]=0 else: SP_NoiseImg[randX,randY]=255 return SP_NoiseImg